
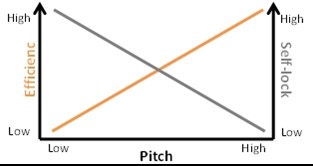
Eine der wichtigsten Fragen bei der Konstruktion eines Linearantriebes ist der komplexe Kompromiss zwischen der Selbstsperrung (die Fähigkeit, die Last nach Halt zu handhaben) und der Effizienz des Aktuatores (wie viel Strom ist zum Heben einer bestimmten Last bei bestimmter Geschwindigkeit erforderlich). Bei der üblichsten Konfiguration mit einem Schneckengetriebe wird die Selbstsperrung durch das Schneckengetriebe gemeinsam mit der Schraubverbindung erreicht. Bei steigender Neigung steigt auch die Effizienz, aber die Fähigkeit zur Selbstsperrung sinkt. Mit sinkender Neigung hingegen sinkt auch die Effizienz, doch man gewinnt an Reibung für die Selbstsperrung.
Einzelheiten zur Selbstsperrung
Es sind drei grundsätzliche Fähigkeiten zur Selbstsperrung zu beachten
- Statisch: Welche Last kann ein Aktuator beim Halt handhaben?
- Dynamisch: Welche Last kann bei einer Bewegung in voller Geschwindigkeit in Lastrichtung angehalten werden (wenn zum Beispiel das Kabel des Aktuators getrennt wird)?
- Bewegungen, die durch die Last, durch Vibrationen, Spiel im Getriebe oder im System verursacht werden, kann das Aktuatoren handhaben? So müssen beispielsweise die Aktuatoren, wenn ein elektrischer Rollstuhl auf einer schlechten Fahrbahn unterwegs ist, der schwankenden Belastung widerstehen können, die zu einer Richtungsänderung zwischen Schub und Zug und zurück führen könnte.
Die ersten beiden Aspekte zur Selbstsperrung sind messbar, doch die transienten Einflüsse sind aus mehreren Gründen schwer einzugrenzen. Zum einen ist eine transiente Last schwierig zu definieren, da sie sich von Anwendung zu Anwendung unterscheidet.

Ein Beispiel: Ein Aktuator kann eine statische wie eine dynamische Selbstsperrung bis zu einer Last von 5 kN beherrschen. Im Beispiel nun ist das Aktuatoren mit einer statischen Last von 1 kN belastet; es kommt eine kurzzeitige transiente Last von –100 N hinzu, die einmal pro Sekunde auftritt. Im Laufe der Zeit verliert das Aktuator seine Positionierung. Auf den ersten Blick wirkt das Szenario hinnehmbar, da der festgelegte Schwellenwert nicht erreicht wird, doch durch die wiederkehrenden transienten Bewegungen wird sich die Last schließlich langsam bewegen. Jedes Mal, wenn die selbstsperrenden Komponenten (Schneckengetriebe und Schraubverbindung) von der negativen Last betroffen sind, löst sich die Selbstsperrung. Sie kehrt zurück, wenn die Last wieder 1 kN beträgt. Bei jedem Zyklus besteht die Gefahr, dass ein Bruchteil einer Drehung verloren geht, was sich zu einer schleichenden Positionsverschiebung summiert.
Es ist ein verbreiteter Irrglaube, dass sich diese Probleme durch Kurzschließen des Motors bis zum Stillstand lösen ließen. Dies stimmt nur zu einem Teil. Das Kurzschließen eines Gleichstrommotors führt in der Tat zu einem sehr effizienten Bremsen, doch das Bremsmoment verhält sich proportional zur Geschwindigkeit (das heißt, dass bei einer Geschwindigkeit von nahezu null auch das Bremsmoment fast null ist). Also wird bei jedem Auslösen einer Positionsverschiebung durch eine transiente Last der kurzgeschlossene Motor diese zwar verlangsamen, noch niemals vollkommen beseitigen.
Selbstsperrung und Effizienz – ein neuer Ansatz
Zum Lösen des Widerspruches zwischen Selbstsperrung und Effizienz hat REAC eine neue Art von Bremse entwickelt, die das Problem zu schwacher Selbstsperrung löst. Diese innovative Lösung bietet mehrere Vorteile:
-
Es ist kein Steuerungssignal seitens des Steuerungssystems erforderlich
-
Das Bremsmoment fungiert als Rückholfeder, was den Rotor auch bei transienter Last in Position hält.
Die Bremswirkung ist nahe null, wenn das Aktuatoren bei normaler Geschwindigkeit bedient wird. - In Kombination mit der Kurzschlussbremse des Motors ergibt sich eine Lösung für alle Fälle.
Diese Technologie wurde in das Aktuatoren RE700 implementiert.